一个好的视觉传感器对机器人来说就是一双明亮的“眼睛”。通过近十年的发展,三维视觉慢慢的变成为机器人的主流和标准配置。尽管当前主流的SLAM(simultaneous localization and mapping,即时定位与地图构建)算法解决了机器人“看到”的问题,但并不可以真正指导机器人的决策,使其“看得懂”。
猎云网是一家机器人视觉解决方案提供商,近日,团队正式推出量产第三代扫地机器人核心部件——视觉传感器。
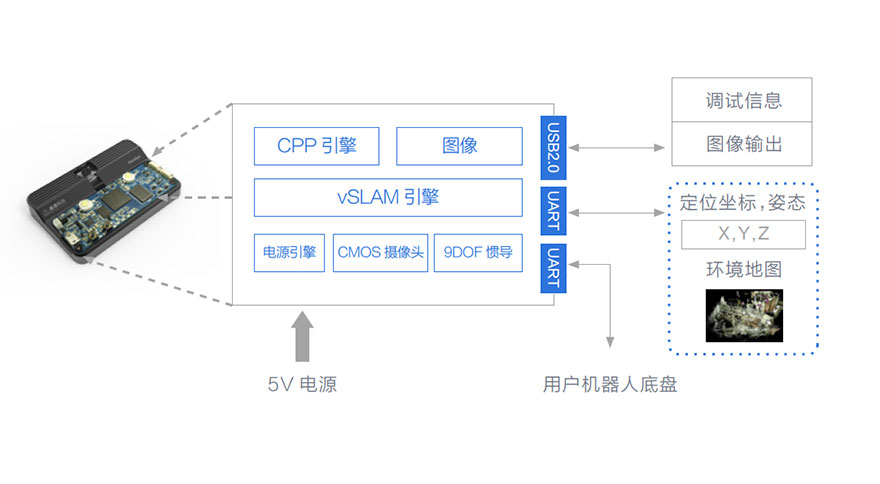
据速感科技创始人&CEO陈震介绍,L-01Camera是一款集成嵌入式vSLAM及规划算法的单目视觉传感器。根据有关的资料,L-01Camera搭载高性能ARM及VPU(Visual Process Unit),拥有一颗广角镜头和9轴惯性单元,返场工作范围可达200㎡,可在20ms内通过前端vSLAM的芯片化运算,完成对一帧图像特征点的嵌入式提取,同时可完成轨迹地图的绘制、全覆盖路径规划,运行时最高功耗仅为0.8W。
据资料统计,2016年在中国本土生产、制造及出口的家用扫地机市场出货量约600万台,预计2017年全球扫地机市场出货量将达到3000万台。
从当前市场来看,主流扫地机器人按清扫策略的不同可分为随机式清扫(第一代)、规划式清扫(第二代)和导航建图式清扫(第三代),随市场接受度的增加以及消费品升级换代的需求,第三代扫地机器人未来三年可达到50%~70%的渗透率。因此,可以帮助第三代扫地机实现导航建图及自主规划的核心部件开始成为所有扫地机厂商争相关注的焦点。
对比欧美地区等发达国家18%的扫地机器人市场渗透率,这一数字在中国不足1%。对于第三代扫地机所需要的核心部件——视觉传感器,目前除国外如iRobot、Dyson等家电巨头具备核心研发能力外,国内诸多厂商对此几乎束手无策。而市场中上述家电企业推出的第三代扫地机器人仍存在诸多不足亟待优化。
据陈震介绍,自去年6月起,团队开始预研、立项、论证、选型、试产、测试到与多家扫地机厂商进行联合设计与调试,前后花费近一年的时间,目前已基本完成可用于量产的这一视觉核心部件,预计今年7月份开放接受下游客户订单。
事实上,SLAM算法是一个典型的民用的技术,最早用于航空探测器对月球、火星表明上进行探测时的导航定位。2010年,随着第一代深度感知设备kinect的诞生,国外SLAM在视觉方面有了较多的应用。2016年上半年,微软Hololens一经推出立刻备受瞩目,其关键技术正是vSLAM。
2012年,还是一名本科学生的陈震慢慢的开始进入实验室,接触国家级军工相关项目的以SLAM技术为主的视觉课题研究。2014年,速感科技成立,致力于vSLAM技术的产品化与市场化,团队至今仍在不断推进技术的迭代过程中。
目前,速感科技主要提供软、硬件一体化的视觉解决方案——ULBrain集成芯片式vSLAM视觉传感器、Inbox高精度SLAM控制器及Xbot机器人硬件控制平台,这几款产品均已供货。
2016年底,速感科技已经面向国内服务机器人厂商推出M-32三维视觉传感器,该传感器采用双目结构光方案摄像头,可帮助服务机器人感知到周围0.5~8米内的三维空间环境信息,用于自主路径规划与障碍物避障。在陈震看来,速感科技的产品直接面向B端客户,间接面向C端客户。不仅有必要了解B端需求也要了解C端需求。
近年,视觉技术慢慢的变成为解决机器人“看不见”问题的主流配置,但受硬件的发展局限,目前现有的产品仍存在运算量偏大的问题,还无法通过前端嵌入芯片的方式解决稠密点云的前端计算。
因此速感科技致力于视觉模组向小型化、模块化、芯片化方向优化。希望能利用低成本、高效的视觉融合方法解决空间中智能设备的感知、定位、导航、规划等关键应用问题。
速感科技已于2014年完成数百万的天使轮融资,投资方为点亮资本;2015年9月获得臻云创投、英诺天使基金的数百万Pre-A轮投资,2017年2月,速感科技完成数百万美元A轮融资,本轮融资由美国旧金山知名风投机构WI Harper Group领投,赛富亚洲基金、启迪之星等机构跟投。
目前,团队有近50人的规模,研发及产品人员超过30人,其中不乏来自微软、阿里等有名的公司及清华、北航、中科院等知名实验室及研究机构。陈震表示,下一个阶段,“我们大家都希望通过在算法、模块及产品方面的积累,推动机器视觉技术的产品化进一步落地。”